Achievements
National 2023:
- South-German Championship 1st Place
- German Championship 2nd Place
WorldCup 2023:
- 5th Place overall
- Best poster and presentation
- Outstanding design award
National 2024:
- South-German Championship 2nd Place
- German Championship 1st Place


Team Information
The made his way up from Lego Soccer over Soccer 1v1 to 2v2 Leightweight. 2023 Matthes Neumann came as a second Software Devloper to the team. This year Samuel Kratzer filled the team as a second hardware Developer.- Fabian Weller (Hardware)
- Matthes Neumann (Sofware)
- Samuel Kratzer (Hardware)
- Rafael Günther (Software)
Features
We use many self-developed software features which we improve as often as possible. Our most important algorithms/features are:- Position-Determination Most tactics rely on our position calculation based on both, goal angles and distances.
- PID-Regulator: We use a PID-Regulator to control the heading of the Lynx-Robot.
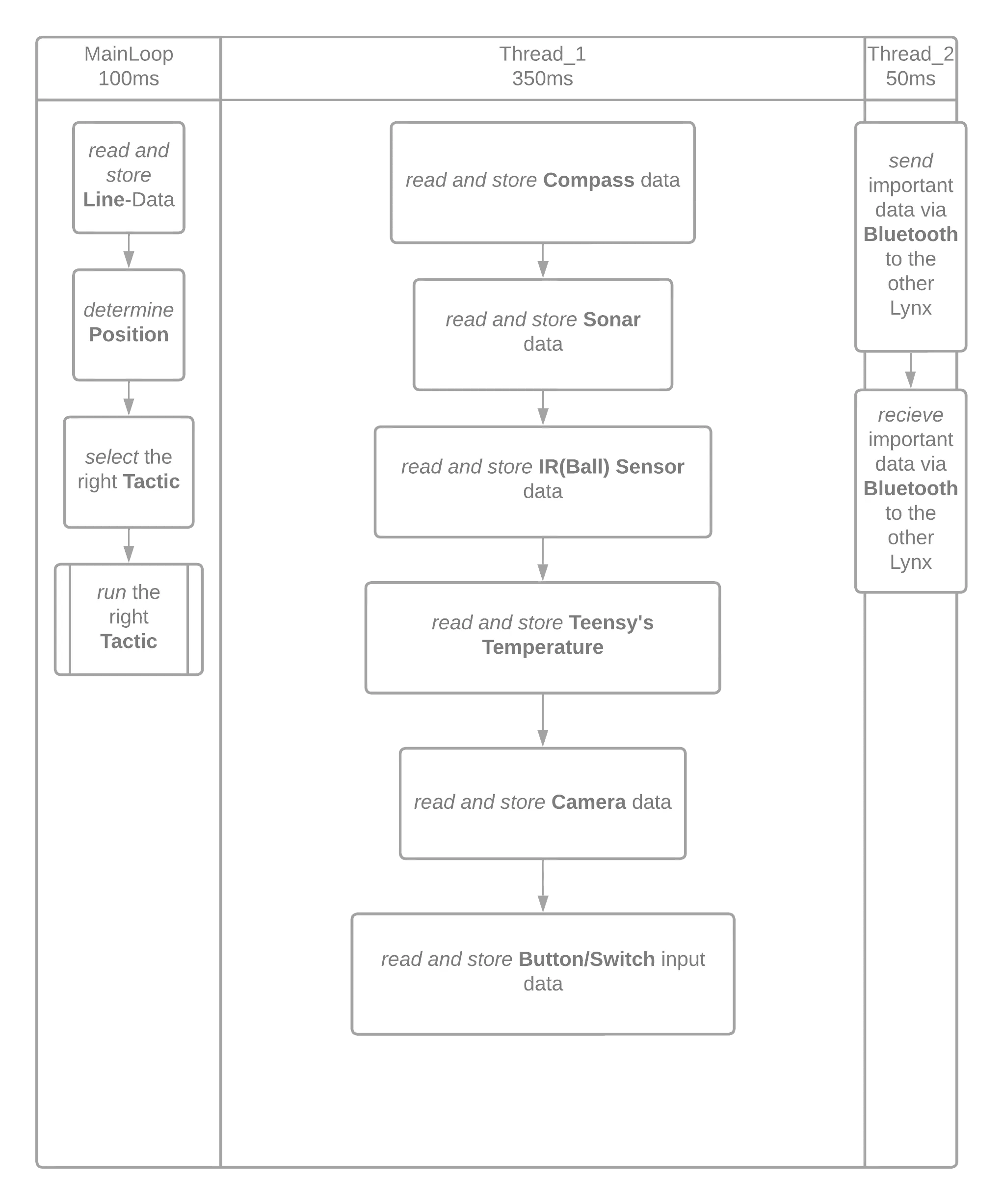
- Multi-Threading Parallizing computation and sensor reading minimizas the reaction time of the robot.
Data
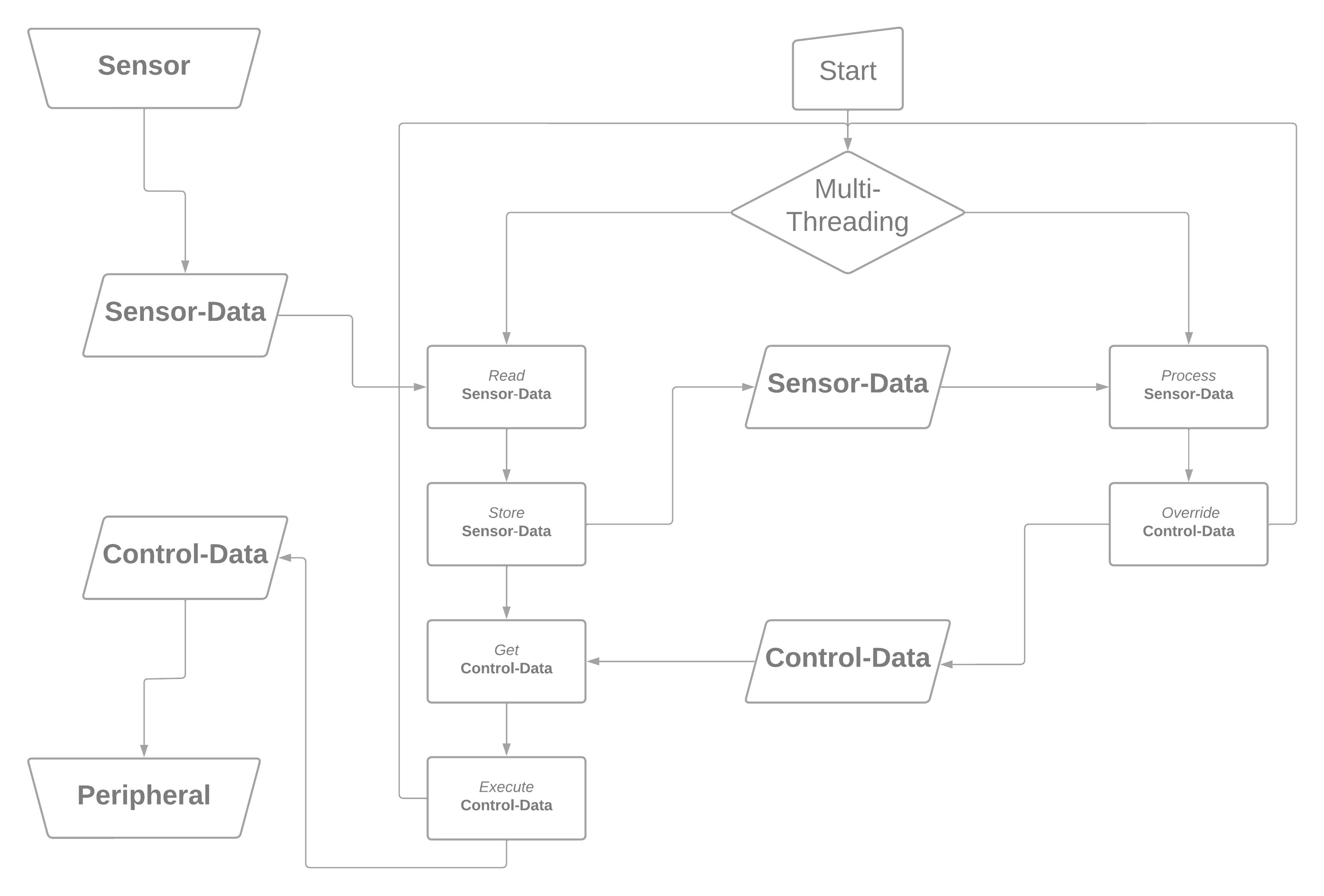
We organized our code in the way you can see in the diagram. It is only a simplification but shows how managing and processing data work independently of each other.We work with a mixture of the imperial and functional paradigms, which makes it possible to have the most stable code. Essentially we never have calls from more than one thread. We use functions in many methods to have very precise information about the environment to be able to response correctly.
Our robots are designed in a way that they can be easily disassembled and reassembled. This is achieved by relying on threaded rods as the main connection between our main an top PCB. This also includes the mount of our kicker in between those two PCBs and the mount of the cameras above the top PCB.
We use 3 PCBs in our robot to seperate the different functionalities. The bottom PCB only handles the line detection while the main PCB handles the power control and motor control. The top PCB is only used for sensors and I/O.
The kicker is very lightweight designed by using springs to store the energy. This also allows us to easily adjust the power of the kicker by changing the springs.
Through the use of over 180 degree lenses we are able to see the whole field with only two cameras.
Since this season we use premium brushless motors to drive faster while still being able to stop fast enough if we detect a line.